OpenCL-3-同步机制
发布时间:2019-07-09 09:30:27编辑:auto阅读(2163)
- 调用clFinish函数,该函数将阻塞直至命令队列中的所有命令都执行完毕。
- 等待一个特定事件的完成
- 执行一个阻塞操作
由于OpenCL在异构系统上进行计算,需要管理并调度多个设备,就需要在设备之间内部或外部进行数据交互以及同步。
1.同步类型
根据同步的类型,同步分为两部分:宿主机端同步和设备端同步。
2.设备端同步
设备端同步主要指同一个内核内不同线程之前的同步,主要用于保证数据的一致性。根据工作组的划分,可以细分为组内同步和全局同步。
2.1组内同步
OpenCL采用宽松的同步模型和内存一致性模型。通常来说,采用硬件实现能够最好的实现同步,但是作为一个跨平台的API,并不能完全实现这些特性。所以OpenCL的解决方案是让程序员明确的知道当前系统的状态,添加同步点,从而可以依据这些信息获取预期行为。
在x86(CPU)平台上,我们使用同步机制如果条件还未满足,我们可以使系统进入休眠等待条件满足。但是GPU上的线程与系统层级的线程不是一个概念,GPU的线程所占用的资源是固定的,不能释放的,这也就导致了如果不同的不同work group不能为同一个资源做同步,因为没有释放的概念,所以必然存在死锁的状态。所以只能组内同步。
组内同步的机制是barrier,即屏障,在组内所有的item没有到达这个barrier之前,所有的item是不想下执行的。
item1
| item2
| | item3
| | |
| 5s |4s | 3s
| | |
------------------------------ 所有达到 barrier之后,同时出发
| | |
| | |2.2全局同步
目前OpenCL不支持与组内同步类似的全局同步方式(原因上方已经介绍)。可以通过global fence以及原子操作来达到目的。
3.宿主机端同步
OpenCL是基于任务并行,主机控制的模型,其中每一项任务都是数据并行的,具体通过使用和设备关联的线程安全的命令队列来实现。当然,内核、数据以及其他操作并不是简单调用来进行的,而是通过异步加入指定的队列中。
从宿主机角度来看,保证宿主机同步的要点有一下三条:
当然,根据所需要同步的计算设备的个数,可以分为单设备同步和多设备同步。
3.1单设备同步
3.1.1设置barrier
clFinish可以阻塞程序的执行直到命令队列中的所有命令都执行完成。但是这只是相当于在末尾加上了一个barrier。在中间加入barrier需要调用如下函数:
cl_int clEnqueueBarrier(
cl_command_queue command_queue
)3.1.2等待事件
等待事件,即将一个等待事件加入命令队列,只有这个等待事件满足以后,才能执行之后加入的命令,使用的命令如下:
cl_int clEnqueueWaitForEvents(
cl_command_queue command_queue,
cl_uint num_events,
const cl_event* event_list
)从变量定义上很好理解,不再赘述。
3.1.3阻塞访问
我们在进行网络访问或者进行IO读取的时候是如何进行阻塞与非阻塞的区分的呢,没错,往往是传入一个标志。对于OpenCL也是一样的,如:
clEnqueReadBuffer(que, CL_TRUEm....)上面这个示例的第二个参数就是指定这个函数是否是同步操作,如果为TRUE,那么就会阻塞直至拷贝完成,如果为FALSE,在设置完后不等拷贝完成,就会返回。
3.2多设备同步
在之前我们已经了解到,使用事件只能在同一个上下文中实现同步。那么在不同的设备不同的上下文中如何实现同步呢,只剩下了一种方法,cFinish,等待另一个命令队列执行完成,之后的命令才能继续执行。如一个CPU一个GPU,两者需要互相访问彼此的数据,那么如何实现同步呢,如果CPU要访问CPU的数据,必须等待CPU当前的命令队列执行完成,不再占用内存,GPU才能进行访问。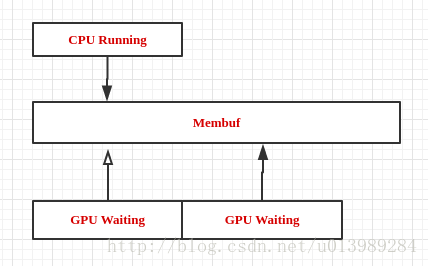
版权声明:本文为博主原创文章,转载需声明为转载内容并添加原文地址。
原文地址:http://coderdock.com
上一篇: PowerShell 学习笔记(3)
下一篇: unity3D引擎
- H3C基本命令大全
53532
- H3C IRF原理及 配置
40353
- Python exit()函数
34757
- python全系列官方中文文档
30516
- python 获取网卡实时流量
25394
- 1.常用turtle功能函数
25183
- python 获取Linux和Windows硬件信息
23597
- 天天基金网数据接口
18875
- Selenium使用代理IP&无头模式访问网站
15175
- Selenium&Pytesseract模拟登录+验证码识别
14688
- LangGraph Studio可视化
1151°
- LangSmith开发-应用入门
1075°
- LangGraph开发-多轮对话问答机器人
1145°
- LangGraph开发-条件分支/循环图实战
1165°
- LangGraph开发-生态介绍,入门demo实战
1199°
- LangChain-接入12306-HTTP MCP智能体
1353°
- LangChain接入自定义爬虫-MCP工具
1313°
- LangChain接入Filesystem-MCP工具
1286°
- LangChain搭建MCP服务端和客户端流程
1384°
- LangGraph与MCP技术概述
1327°
- 姓名:Run
- 职业:谜
- 邮箱:383697894@qq.com
- 定位:上海 · 松江